SimulRobot - 3 - Correction
Informations

| Nom | SimulRobot - 3 - Correction |
|---|---|
| Category | Windows C++ |
| Type | Test |
| Version | 0.8 |
| Date de Publication | 2004-03-10 |
Description
Coupe de Robotique E=M6 - 2004
La version proposée en téléchargement est une version du logiciel basée sur une utilisation de la caméra pour détecter les balles, avec calcul par l'I.A. de sa position théorique, et correction de cette position par l'utilisation de capteurs IR de distance
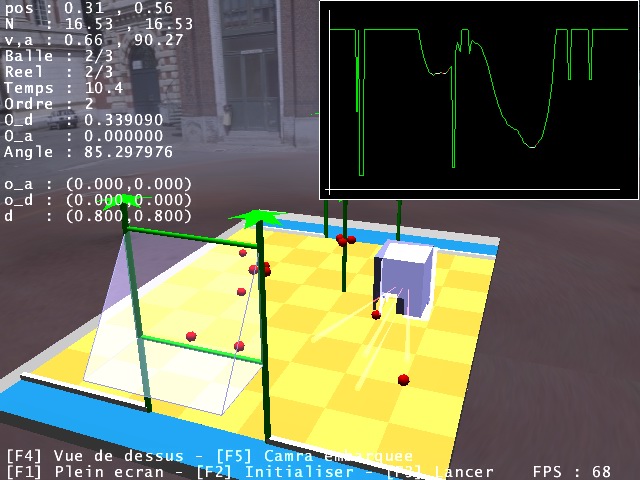
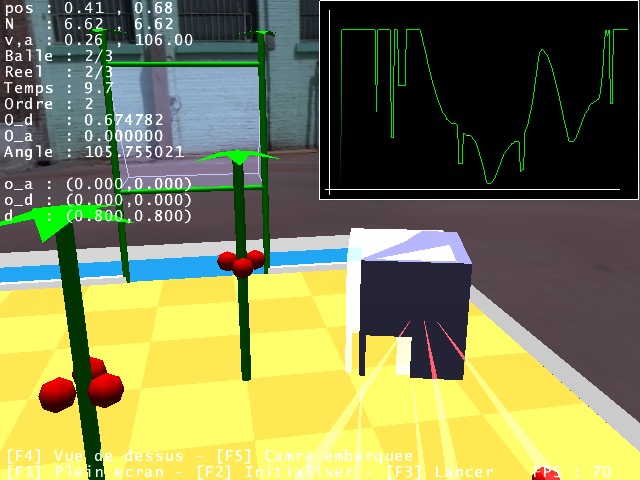
Afin de prévoir le comportement du robot, et de commencer a programmer son "intelligence", un programme simulant son environnement physique a été créé.
Dans un premier temps, ce programme a été autonome, puis a été modifié afin que le robot virtuel soit directement commandé par le micro-contrôleur du robot (un PIC 18F452) via le port COM du PC.
Cette simulation comporte plusieurs points :
- Modélisation 3D de la scène (programmation en C++ avec OpenGL).
- Modélisation du robot, des palmiers, des balles, et des différents capteurs équipant le robot
- Gestion des collisions entre le robot, le terrain, les palmiers, et les balles.
- Gestion de la physique des balles.
- Gestion des mouvements du robot.
- Gestion des communications entre les différents composants du robot.
- Gestion de la camera.
- ...
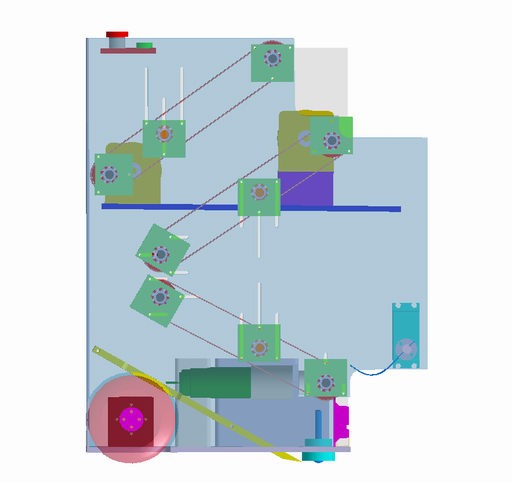
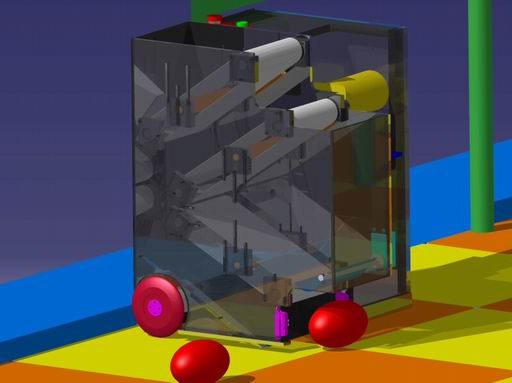
Modèle CAO du robot
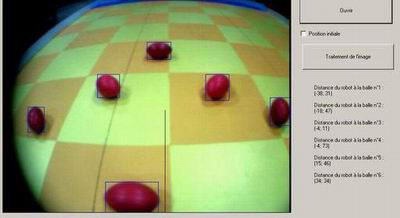
Logiciel de test pour la détection des balles

L'électronique du robot
Modèle CAO du robot dans son environnement

Le robot en cours de construction
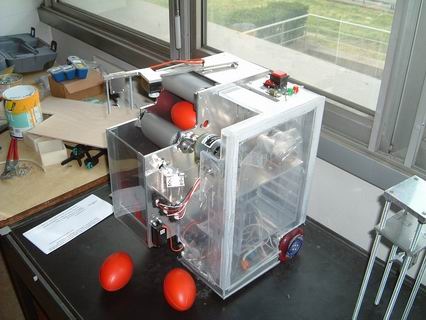
Le robot en fin de construction
La version proposée en téléchargement est une version du logiciel basée sur une utilisation de la caméra pour détecter les balles, avec calcul par l'I.A. de sa position théorique, et correction de cette position par l'utilisation de capteurs IR de distance
Afin de prévoir le comportement du robot, et de commencer a programmer son "intelligence", un programme simulant son environnement physique a été créé.
Dans un premier temps, ce programme a été autonome, puis a été modifié afin que le robot virtuel soit directement commandé par le micro-contrôleur du robot (un PIC 18F452) via le port COM du PC.
Cette simulation comporte plusieurs points :
- Modélisation 3D de la scène (programmation en C++ avec OpenGL).
- Modélisation du robot, des palmiers, des balles, et des différents capteurs équipant le robot
- Gestion des collisions entre le robot, le terrain, les palmiers, et les balles.
- Gestion de la physique des balles.
- Gestion des mouvements du robot.
- Gestion des communications entre les différents composants du robot.
- Gestion de la camera.
- ...
| Equipe ENSAM Paris - Coupe Robotique E=M6 2004 | |
|---|---|
| Auburn | Informatique + Electronique |
| ChouFleur | Electronique + C.M. |
| Enzo | Electronique |
| Hacker | Gestion des cameras, reconnaissance d'image |
| Minido | Conception mecanique du robot principal + Fabrication + Sponsoring |
| Samsagace | Responsable d'equipe, conception du robot secondaire |
| Spipu | Informatique + Webmaster + Simulation |
| Tuner | Conception mecanique du robot principal + Fabrication |
Modèle CAO du robot
Logiciel de test pour la détection des balles
L'électronique du robot
Modèle CAO du robot dans son environnement
Le robot en cours de construction
Le robot en fin de construction